| This version reflects the comments of the core participants as reviewed and incorporated in accordance with CORD's FIPSE-supported Curriculum Morphing Project. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
MODULE 7 (1)One area in which the laser has found widespread application is in those construction and fabrication processes where it is important to have an accurate, easily accessible reference point, line or base. The reference might be simply a straight line that can be used to position components or structures. Or the reference might be the direction of gravity (either horizontally or vertically referenced), so that structural members can be positioned level, upright, and "square" with respect to each other. With a straight line, it is also possible to accurately measure the deviation of some point (such as a tool point on a very long lathe bed) from a given reference axis. (2)Similar applications occur for cameras, gun bores, or radar antennas that must be aimed at the same point in space, or "bore-sighted." In this case, we’re concerned with the angular alignment of some device relative to a reference axis, such as that provided by a visible CW laser beam. A related application is the ability of special types of receivers, called angle-tracking receivers, to accurately measure the angular movement of a laser (or other optical source) about the receiver axis. Frequently encountered applications include optical system alignment, surveying, geology and missile tracking. (3)In this chapter, we will study the techniques by which electro-optical systems can be applied to alignment problems, the component technology that makes such systems possible, and several representative alignment and tracking systems. (4)You will find material on power and directionally, geometrical optics, distance-measuring systems, and photodetectors helpful as background information.

(5)Upon completion of this chapter, you should be able to do the following: 1. Define the following terms:
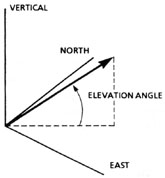
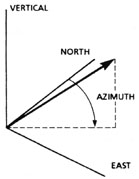
2. Draw and label diagrams illustrating the rotation of an optical axis in elevation and in azimuth. 3. Describe the basic elements of an angle-tracking system. Your description should include an angle-sensitive receiver. 4. Describe how angle measurements may be deduced from measurements of the lateral displacement of the image at the focal plane of the objective lens in an angle-tracking system. 5. Describe the following types of position-sensitive detectors:
Include a drawing of each device and, for the quadrant photodiode, the basic method of position sensing by measuring photocurrents through the four sectors. For the image-dissecting photomultiplier, include descriptions of the search mode and track mode. 6. Draw and label a diagram of a typical commercial alignment system and describe the operation of the system. The components shown in your drawings should be similar to those in the text. 7. Perform calculations related to angle tracking. 8. Assemble and operate a laser angle-tracking receiver employing a silicon position sensor. 9. Measure the angular displacement of a laser that is mounted on a linear translator. 10. Measure the degree and accuracy of the position sensitivity in Objective 9. DISCUSSION (6)Before we begin the discussion of angle-tracking and alignment devices, you need to understand the terminology that describes these concepts. (7)Angular Measurement: Two systems of units are frequently encountered when we
describe angular measurements. The first system uses the degree, defined as
You should memorize the following conversion factors:
(8)When using the degree system, the term arc-second or arc-minute frequently is used to avoid confusion with units for time. (9)Direction of Rotation: To specify precisely the direction that you must "point" an optical instrument or system to cause the optical axis to fall on the desired spot, we need to define how we will manipulate the instrument. This should be done in such a way to permit another person to duplicate the direction and achieve the same result. Gravity (as established by a level or plumb-bob) is the reference to which most systems are aligned. In the gravity-reference frame, we define the following two angular measurements:
Fig. 1
Fig. 2
(10)The proper rotation in azimuth and elevation will allow the pointing of an optical axis at any point in space. For this reason, tracking systems often are mounted on rotational platforms (called tracking pedestals) that allow independent rotation in azimuth and elevation.
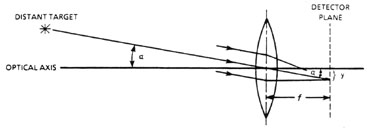
Angle-tracking Techniques (11)An optical tracking system consists of (1) an angle-sensitive receiver, and (2) a tracking target, such as a laser, an LED, a retroreflector or any other target that can be optically differentiated from its background. (12)In its simplest form, an angle-tracking receiver consists of (1) an objective lens with a known focal length, and (2) a photosensitive detector that can indicate the position on its surface at which the target radiation is focused. (13)We deduce angular information from the known focal length of the optics and the known position sensitivity of the detector as shown in Figure 3. Suppose light from a source at a large distance (say, a distance much larger than any of the optical system’s dimensions) is collected by a lens, and focused onto a position-sensitive detector. From geometrical optics, we can calculate the angle between the incoming ray bundle and the optical axis common to the objective and detector (or "boresight"):
Fig. 3
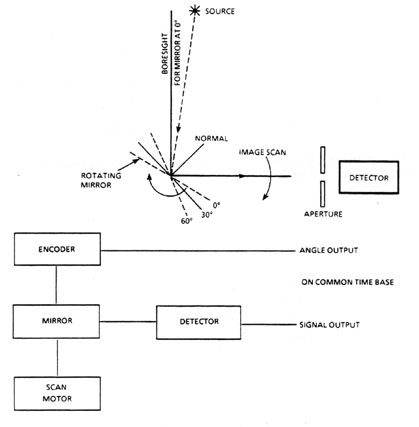
(14)It is worth noting that longer-focal-length receiving systems produce a larger-displacement at the focal plane. Therefore, longer-focal-length objectives are more sensitive in detecting off-axis displacements. (15)Another technique commonly used to track or measure the angular position of an image consists of a spinning or scanning mirror that deflects the image to the detector. This scheme allows the use of a standard detector. But it requires a mechanical means of scanning the mirror smoothly at a known angular rate of rotation. A typical scanned mirror system is shown in Figure 4. The ability to measure angular information in such a system depends on the accuracy to which the mirror position is known. A shaft encoder that can very accurately measure angular rotation about an axis usually is found in scanning mirror systems.
Fig. 4
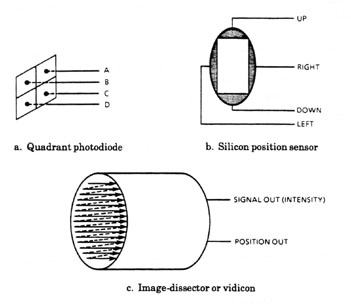
Position-sensitive Detectors (16)Recall that, if the focal length of the objective and the linear displaceent of the image from the optical axis are known, the angle between the object and the optical axis can be calculated. The devices that allow this measurement usually produce an output voltage that corresponds to the position of the image on the face of the detector. We will discuss briefly several of the more common position-sensitive detectors. (17)Figure 5 shows some of the more common position-sensitive detectors. They include:
Fig. 5
(18)Similar techniques are used in angle-measurement systems using quadrant detectors, image dissectors, vidicons, and silicon position sensors. We will describe the characteristics of these devices.
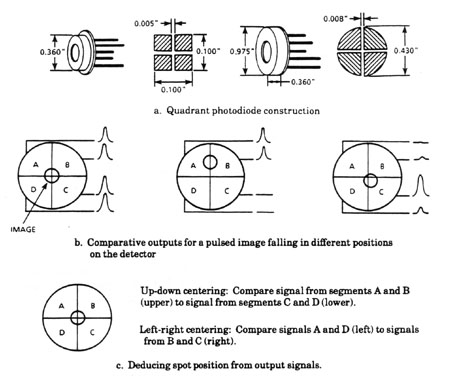
Quadrant Photodiodes (19)A quadrant photodiode is an imaging surface that has been physically separated into four equal-area segments. Each segment has a separate connector for signal output as shown in Figure 6a. Position information is derived from the relative signal output from each segment, as shown in Figure 6b. When the focused image is centered on the quadrant detector, each segment will receive the same amount of optical radiation, and all four signal outputs will be equal. As the image moves on the detector surface (corresponding to an angular change of the object being tracked), more radiation falls on one of the segments and less on the opposite segment.
Fig. 6
(20)Figure 6c shows how position information is provided by a quadrant photodiode. If more optical energy falls above the horizontal line, more photocurrent will flow through the upper segments (A and B) than through the lower segments (C and D). In trying to decide on the up-down position of the spot, we then would be concerned with the relative amplitudes of (A + B) – (C + D). Similarly, the term (A + D) – (B + C) would give information about the left-right position. In practice, it is common to perform this analysis electronically, using operational amplifiers to compute the appropriate sums and differences. (21)In most tracking and alignment applications, a major parameter of concern is the ability of the detector to supply a very precise description of the location of the focused image on the face of the detector. In other words, we are concerned with the change in output signal in relation to a change in the position of the spot. "Sensitivity" is used in this case to describe the ratio
(22)Position sensitivity of a position-sensitive detector normally is expressed in terms of millivolts per millimeter, or millivolts per thousandth of an inch (mil). It is desirable for this ratio to change when the image moves nearer the edges of the detector. (23)In most solid-state position sensors, a nonlinear response does occur. As long as the image is located near the center of the detector, the energy falling onto each quadrant is about equal, and small movements of the image result in small changes in the energy distributed in any one quadrant. When the image moves near the edge of the detector, a different situation exists. There will be at least one quadrant receiving very little energy, and small movements will result in large changes in the signal resulting from that quadrant. (24)Another problem inherent in quadrant photodiodes is the finite width of the separation between segments. If the image is focused to a small spot size, erroneous information will result when the spot falls on the border between segments. This problem usually is avoided by defocusing the image or by using a long-focal-length objective that results in a larger image size and displacement. (25)Additionally, some position information is lost when the entire image falls within one segment. This problem also can be avoided by defocusing or use of longer-focal-length optics. (26)Aside from the constraints mentioned, quadrant photodiodes behave identically to conventional silicon photodiodes. Spectral response, rise time, noise characteristics, and responsivity are identical to the characteristics of a single-element silicon detector. (27)When position (or angular) information is desired from a pulsed source, it is necessary to add electronic circuitry that "freezes" the peak value of the pulses from each quadrant. The circuit that accomplishes this task is known as a peak output detector circuit.
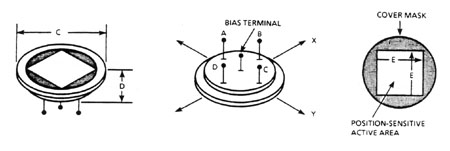
Silicon Position Sensors (28)A silicon position sensor consists of a segment of photodetective silicon with either two or four terminals for signal output and a terminal for application of back-bias voltage, as shown in Figure 7. This device sometimes is called a lateral-effect photodiode. Note that ther is no separation into segments as in a quadrant photodiode.
Fig. 7
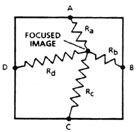
(29)Position information in this device also is deduced by comparing the signal outputs from each terminal. Assume that an optical image is focused on the detector as shown in Figure 8. The focused image will cause a current to flow. But, because of the construction of the diode, the current can flow only by traveling through the silicon to each of the four output terminals. Because the silicon has a given resistance per unit length, more current will flow to the closest terminals and less cureent to the terminals that are farthest from the focused image. Obviously, when the current from all four terminals is equal, the image is focused on the center of the detector.
Fig. 8
(30)Position sensors of this type have several advantages over quadrant devices. Because there is no "gap" (as between segments in quadrant detectors) in the active areas, the size of the image is not subject to constraints on minimum diameter. A second advantage is that position information is available as long as the image falls somewhere on the active area of the detector. One disadvantage is that frequency response of such detectors tends to be lower than for a conventional silicon detector of the same size, because of the series resistance that the photocurrent encounters at the detector surface.
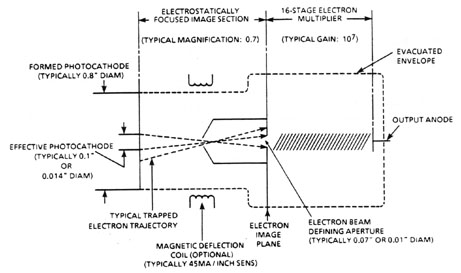
Image-dissecting Photomultipliers (31)An image dissector is a modified photomultiplier tube (PMT). The modifications make it possible to identify the areas of the photocathode that is generating the photocurrent. A diagram of an image dissector is shown in Figure 9. The normal photomultiplier elements, such as the photocathode, dynodes, and anode are all present in the image-dissection PMT.
Fig. 9
(32)The modifications that make a PMT an image dissector are the electron-beam-defining aperture, an electrostatic field that focuses the photoelectron beam from the photocathode, and a deflection scheme that makes it possible to "steer" the beam through the aperture. Knowledge of the deflection required to steer the beam through the aperture then locates the position of the image on the photocathode. (33)Image dissectors operate in two modes. When the location of the image on the photocathode is not known, it is necessary to systematically search the face of the tube until the image has been located. This mode is known as the search mode. Once the image has been located, it is no longer necessary to search the face of the tube. Only the small area of the photocathode immediately surrounding the image location has to be searched. (This is necessary to ensure that, if the target moves, the image will not be lost.) This mode is called the track mode. (34)The accuracy of an image dissector (and of a tracking system using an image dissector) depends on the accuracy with which the beam of electrons from the photocathode can be deflected. The electrical circuitry to perform this deflection is complex and bulky in comparison to the peripheral circuitry for a quadrant photodiode or silicon position sensor. However, in low-level signal-tracking applications (such as star tracking) the greater sensitivity of image dissectors compensates for the complex circuitry that they require.
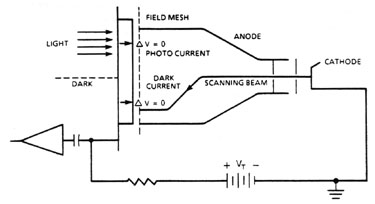
Vidicons and Other Imaging Devices (35)A vidicon is a type of imaging detector used in television cameras. Vidicons in tracking systems are used in a manner very similar to the image dissector. That is, position information is gathered from the deflection current that was being applied when a signal was picked up. (36)Intermally, the vidicon is very different from an image dissector, as is obvious from Figure 10. The vidicon does not have the aperture or dynode multiplier structure, and the photosensitive structure is photoconductive or other than photoemissive. Electrical charge on the photosensitive surface of the vidicon changes with the level of incident light. The amount of charge that is replaced by a scanned electron beam is monitored, along with the beam’s position, to give information about the position and intensity of the image.
Fig. 10
(37)Other imaging tubes that have been used in television application—such as isocons, plumicons, secondary electron conduction tubes (SEC), and orthicons—can be similarly used in position-sensing applications.
Scanning Mirror Angle Trackers (38)In applications where it is necessary to track targets that undergo large angular movements (greater than 20 or 30 degrees), it may be advantageous to use a conventional detector (rather than a position-sensitive one), and use some mechanical technique to change the angle at which the detector is pointed. Figure 4, shown earlier, indicates a simplified scanning-mirror angle-tracking system. By monitoring both the signal output and the encoder’s angle output, one can identify the angular position of the target as the mirror "scans" the image across the detector. (39)While the concept of a scanning-mirror system is simple, the mechanical complexity of such a system is much greater than the complexity of systems like the quadrant detector discussed previously.
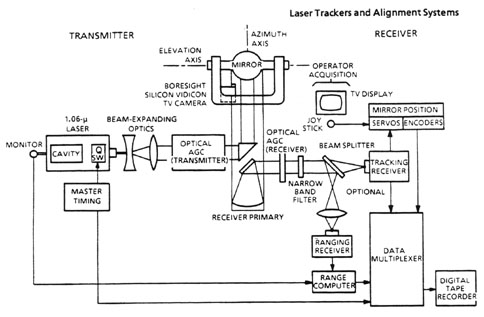
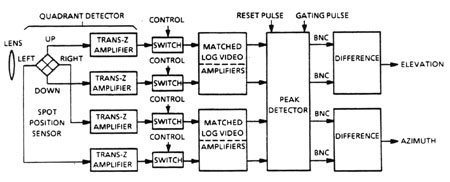
Representative Angle-tracking Systems (40)With the techniques described above, it is possible to construct sophisticated tracking systems for a wide variety of applications. We will describe a representative system. (41)The Precision Aircraft Tracking System (PATS) is an electro-optical tracking system developed to provide range and angle information for a moving target. The system has been used to monitor continuously the position of new commercial aircraft during FAA qualificaitons. (42)The PATS consists of a Q-switched YAG laser illuminator and collimating optics, a number of retroreflector (or corner cube) tracking targets mounted on the aircraft, an angle-sensitive tracking receiver, and a servo-controlled pedestal that points the optical system at the target. A diagram of the PATS is shown in Figure 11. A detailed diagram of the tracking receiver is given in Figure 12. Logarithmic amplifiers are used in the signal-processing circuitry to allow the system to accommodate large differences in received power.
Fig. 11
Fig. 12
(43)Some characteristics of PATS are given in Table 1. Table 1. Characteristics of the PATS System
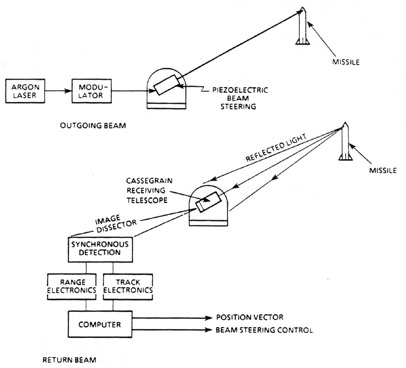
Laser Ranging and Tracking at White Sands Missile Range (44)A continuous laser tracking system based on an argon laser has been used at White Sands Missile Range in New Mexico to track missiles from launch. The 5-watt laser is fixed in position and the beam is moved by a piezoelectric deflection system. The beam tracks the nose cone of the missile, and is kept centered on the nose cone. The angular tracking is performed with an image-dissector tube. The range information is obtained by beam modulation telemetry through sinusoidal modulation of the laser beam. Figure 14 shows a schematic diagram of the system.
Fig. 14
(45)The system determines both range and tracking data, and thus determines the position vector of the missile’s nose cone to the following precision:
Alignment Applications A Commercial Laser Alignment System (46)The use of lasers as a precise reference line was mentioned in the introduction. Along with the applications mentioned previously, laser alignment systems have been used in many ways such as in the construction of pipelines, nuclear particle accelerators, and many assembly jobs where precise positioning is mandatory. In one case, a helium-neon laser has been applied to align the wing jet engines in supersonic transport prototypes to an accuracy of ± 0.04 mm. Such accuracies are commonplace, and several commercial manufacturers have developed systems to use this technology. (47)Laser alignment systems are used for the construction trade and large-scale mechanical fabrication. It is possible to measure vertical and horizontal displacement of a workpiece from a straight-line reference established by a low-power HeNe laser. Accessories are available to add angular alignment capability to the basic system. Other optical accessories make it possible to generate a straight-line vertical reference at 90° ± 1 second to the gravity-referenced horizontal axis. (48)A block diagram of the system is shown in Figure 15. The laser is a modulated
helium-neon device with an output power of 0.5 mW. The modulation (at 10 kHz) makes it
possible to reject ambient radiation by using an electronic filter in the readout unit.
The detector target consists of a quadrant photodiode that is capable of reading
displacements of less than 0.002 inch. The maximum operating range of the system is
approximately 300 feet. The diameter of the beam at the laser is
Fig. 15
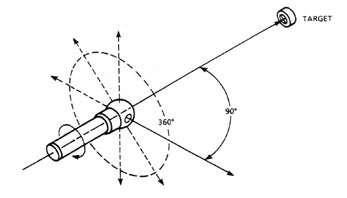
(49)Several accessories are available that greatly expand the usefulness of the system. An autocollimator option allows the alignment of a surface within 2 arc seconds at distances up to 150 feet. An optical square accessory (Figure 16) aids in the vertical alignment of upright structures (such as bulkheads) and other structures perpendicular to the optical axis.
Fig. 16
(50)The optical square uses a pentaprism (a five-sided prism) that is rotated about the axis of the incoming beam. The prism deflects the beam by 90° , so as to sweep the beam into a plane. Then structures can be aligned with respect to this plane defined by the scanning beam of light. The pentaprism is used for this application because it has the property of accurately deflecting the beam by 90° , even if it is not accurately aligned, or even if vibrations or wobble are present in the mechanically rotating parts. (51)The laser most often used for such industrial applications is a low-power (few-milliwatt) HeNe laser. The alignment of the laser beam with respect to the laser housing is critical. For this reason, laser manufacturers design them to be highly stable and to have minimum wander of the beam. (52)The precision of such instruments is around 10–6 radians. At large distances the precision is limited by atmospheric turbulence and by the random wander of the beam direction with respect to its housing. At shorter distances, the resolution of the position-sensitive detector becomes the limiting factor. Table 2 shows some characteristics of HeNe laser suitable for alignment applications. Table 2. Characteristics of HeNe Laser
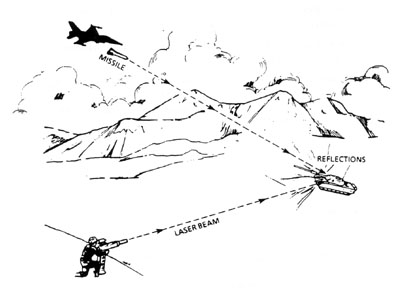
Target Designators (53)Another application related to alignment is that of target designators. This is a military application that has become important for guiding so-called "smart" bombs and missiles toward their targets. The application is sketched in Figure 17, which shows a homing missile and the laser designator. The forward observer aims the laser at the target. The missile has a detector which locks on to the laser light reflected from the target, and guides the missile to the target. In most cases, a Q-switched Nd:YAG laser is used.
Fig. 17 
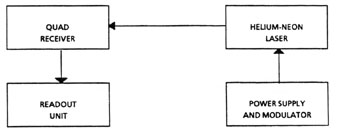
1. Explain and sketch, where useful, the following terms: radian, elevation angle, azimuth angle, and gravity reference. 2. Draw and label diagrams illustrating the rotation of an optical axis (a) in elevation and (b) in azimuth. 3. Describe the basic elements of an angle-tracking system. 4. Describe how you can deduce angle measurements from measurements of the lateral displacement of the image at the focal plane of the objective lens in an angle-tracking system and knowledge of the focal length of the objective lens. 5. Describe the following types of position-sensitive detectors: quadrant photodiode, silicon position sensor, image-dissecting photomultiplier, vidicon, and scanning-mirror angle tracker. Your description should include a drawing of each device and, for a quadrant photodiode, the basic method of position sensing by measuring photocurrents through the four sectors. For the image-dissecting photomultiplier, include description of the search mode and track mode. 6. Draw and label a diagram of a typical commercial alignment system, and describe the operation of the system. 7. In an angle-tracking system with a lens that has a focal length of 40 cm, the light from a distant target enters the system at an angle of 0.05 radian from the optical axis. How far from the center of the detector will the image be located? 
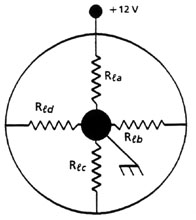
0.1- to 1-mW HeNe laser Digital voltmeter (DVM) Optical rail Translation stage United Detector Technology silicon position sensor 0- to 12-volt DC power supply Miscellaneous electronic components 
Caution: The laser beam and its reflection from the sensor may be an eye hazard. Take all necessary safety precautions appropriate for this class of laser. 1. Fabricate the circuit as shown in Figure 18. Use 2-kW , 1% resistors for the four Rl ’s.
Fig. 18
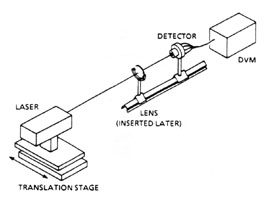
2. Mount the detector on the optical rail so that the face of the detector is perpendicular to and centered over the rail. 3. Attach the laser to the translation stage. Then mount the translation stage on the rail so the laser beam is parallel to the rail and can be moved in a horizontal direction sweeping across the face of the detector. Adjust the position of the detector so that the laser beam strikes the center of its sensitive area. 4. Connect the DVM so that it will measure the voltage across either Rl a or Rl c . 5. Align the sensor so that the beam moves along the horizontal axis of the detector. Do this by moving the detector in the horizontal direction while monitoring the voltage across either Rl a or Rl c . If the voltage changes, rotate the detector around the axis parallel to the laser beam and repeat the motion. A larger change in voltage indicates that you rotated the detector in the wrong direction. Continue rotating and translating the detector until the voltage remains constant as the beam crosses the detector’s surface. 6. Connect the DVM so that it measures the voltage across Rl b. Move the sensor so that the beam strikes one edge of the detector. Move the beam across the sensor in 1-mm increments. At each position, record the voltage and position in a table similar to the one shown in Figure 19.
Fig. 19
7. Repeat Step 6 but measure the voltage across Rl d. 8. Plot the voltage across Rl b and Rl d as a function of the beam’s position. You may need to use two separate graphs, depending on your particular data. Note any nonlinearity of the voltage as the beam nears the edge of the sensor. 9. Using the linear portion of the graph, calculate the positional sensitivity, D X/D V, of the sensor for both measurements. Explain any differences in the two values. 
Bachman, C.G. Laser Radar Systems and Techniques, Chapters 5 and 6. Dedham, MA: Artech House, Inc., 1979. Charschan, S.S., Editor. Lasers in Industry, Chapter 7, New York: Van Nostrand Reinhold Co., 1972. Frame, W.W. "Electronic Boresight Stabilization in Military Laser Systems," Lasers and Applications, 87, March 1984. Hinman, W., and W. Cannizzo. "Military Ground-based Laser Designators," Lasers and Applications, 59, September 1983. Harrison, P.W. "Alignment Techniques," Optical Transducers and Techniques in Engineering Measurement. A.R. Luxmoore, Editor, London and New York: Applied Science Publishers, 1983. Johnson, R.E. "Optical Engineering of First and Second Generation Automatic Tracking/Laser Designator Pods," Optical Engineering 18, 370, 1979. Lehr, G.G. "Laser Tracking Systems," Laser Applications, M. Ross, Editor, Volume 2, New York: Academic Press, 1974. Ready, J.F. Industrial Applications of Lasers, Chapter 8. New York: Academic Press, Inc., 1978. Stetson, K.A., and J. Palecki. "Optical Plumb Bob," Applied Optics 23, 3420, 1984. --------------------------------------------------------------
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||